
赤外線サーモグラフィは、対象物に触れることなく温度分布を可視化できる技術です。
その本質は、物体が放射する赤外線エネルギーを検出し、温度に変換することにあります。

ただし、サーモグラフィは単純に「温度を直接測っている」わけではありません。
実際には、
・ 放射
・ 反射
・ 透過
といった複数の要素が組み合わさった赤外線を受け取っています。

このページでは、赤外線サーモグラフィの原理を、
設備診断で使えるレベルまで分解して解説します。
赤外線とは何か:温度と放射の関係
すべての物体は、その温度に応じて赤外線を放射しています。これがサーモグラフィの出発点です。物体は絶対零度(-273℃)以上であれば必ず電磁波を放射します。その中で、温度測定に使われるのが赤外線領域です。
温度が高いほど、放射されるエネルギー量は増加します。
つまりサーモグラフィは、 「赤外線の強さ」を 「温度」に変換している装置です。
- 説明リスト
- 赤外線とは
- 温度との関係
- 補足ボックス
「すべての物体は赤外線を出している」
放射・反射・透過:サーモグラフィが受け取るもの
サーモグラフィが受け取る赤外線は、単純な「対象からの放射」だけではありません。

カメラが受け取る赤外線は、以下の合成です。
① 放射(Emission)
対象物自身が放射する赤外線
② 反射(Reflection)
周囲の赤外線が対象表面で反射したもの
③ 透過(Transmission)
対象を通過してきた赤外線(主にガラスなど)
NG 放射だけと考える
OK 3要素で理解する
放射率と温度変換の仕組み
サーモグラフィは、受け取った赤外線をそのまま温度にしているわけではありません。
放射率を使って補正し、温度に変換しています。
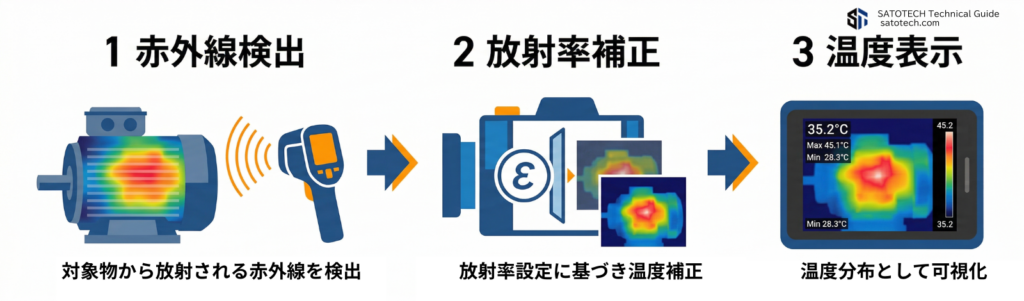
カメラは内部で以下の処理を行っています。
- 赤外線エネルギーを検出
- 放射率を考慮
- 温度に換算
赤外線センサーと画像化の仕組み
サーモグラフィは単なる温度計ではなく、温度分布を画像として表示する装置です。サーモグラフィには赤外線センサー(検出素子)が搭載されています。
サーモグラフィの赤外線センサーが
・各ピクセルごとに赤外線を検出
・温度に変換
・ 画像として表示します。
重要なポイント
- 1画素=1温度ではない場合がある
- 分解能が低いと混ざる
- 小さい対象は測りにくい
SWELLブロック提案
- 図解ボックス
センサー → ピクセル → 画像 - 注意ボックス
「対象サイズに注意」
原理を理解した上での実務判断
サーモグラフィの原理を理解すると、「何ができて何ができないか」が明確になります。
できること
- 温度分布の可視化
- 異常発熱の検出
- 比較診断
できないこと
- 内部構造の直接観察
- 原因の単独断定
- 完全な絶対温度測定
よくある質問と回答 FAQ
- 赤外線サーモグラフィは何を測っていますか?
-
赤外線エネルギーを測定し温度に変換しています。
- なぜ温度がずれるのですか?
-
放射率や反射の影響です。
- 反射とは何ですか?
-
周囲の熱が映り込む現象です。
- 内部温度はわかりますか?
-
直接はわかりません。
- ガラス越しに測れますか?
-
基本的に不可です(透過の影響)。
- なぜ比較診断が重要ですか?
-
誤差があるためです。